Racquetball Launcher for a USV
Timeframe: Fall 2022
Scope: EGNR260 Engineering Research Methods
Problem: Research problem to create a racquetball launcher for RobotX 2022 that uses vision feedback to self-correct its shots.

My Engineering Research class at Lake Superior State University was tasked with collaborating with Team AMORE (Autonomous Maritime Operations and Robotics Engineering) to develop a racquetball launcher for a task in the 2022 Maritime RobotX Challenge. Task 7 involved identifying a dock with three targets, choosing which target to shoot at (based on information received in a previous task), and delivering a ball into the target with a maximum of 4 attempts.
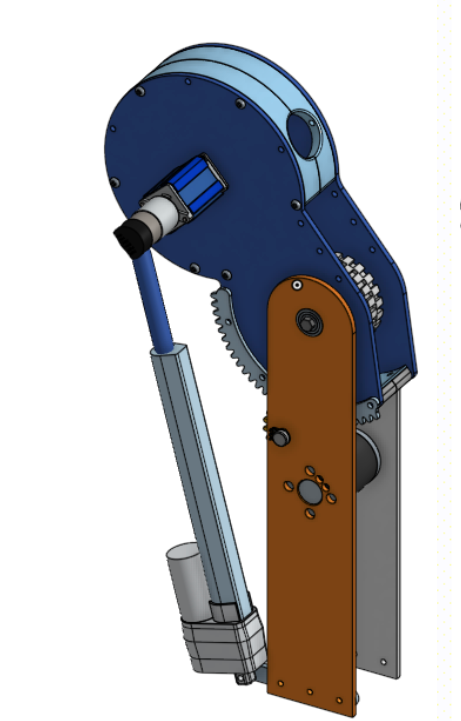
Final CAD design of our concept before creation

Team AMORE’s USV docked in front of the Task 7 targets

The completed launcher set up in Team AMORE’s pit in Sydney.
We decided to use a single-driven hooded launcher, that could adjust its angle based on the accuracy of the first shot. The shooter was a compilation of parts we had access to and could make, including motors salvaged from FIRST Robotics, 3D printed PETG structural components, and CNC machined aluminum and plexiglass sides.
The launcher consists of two wheels, a shooter wheel that was belt-driven from a DC motor below it, and a magazine with a compartmented wheel holding the racquetballs above so that they would drop down into the shooter wheel. The angle of the ball when it leaves the shooter is controlled by a linear actuator that raises and lowers the back end of the launcher. A potentiometer below the shooter wheel returns the launch angle to the Teensy 4.1 that controls the launcher. The Teensy receives a signal from the USV to launch, and turns on the shooter and revolver motors.
To use the launcher, the USV must identify the correct of the three colored targets using its onboard Zed2i camera and position itself up against the dock the target rests on. The USV sends a signal to the launcher to shoot the first ball. The camera tracks the ball and uses object recognition to decide whether or not it went in. If the ball does not go in, the USV decides if it went high or low, and sends a signal to the Teensy to adjust up or down, and then shoot again. Based on previous research, we decided that as long as the USV could stay relatively still, the launcher should be able to accurately deliver a racquetball in three tries.
First prototype successfully launching in the lab.
We packed and took the launcher to Sydney for the RobotX Challenge, but due to issues with rebuilding the launcher and with the USV, the launcher was never able to get mounted and out on the water. However, in the laboratory, the launcher did perform as intended. In the future the launcher will be tested on the USV to determine if it works on a moving platform, and likely improved upon by Team AMORE and future classes.